About
I am a control and AI engineer and scientist combining theory and application to deliver innovative solutions. Working as a research scientist in the Control Systems Group at Technische Universität Berlin, I received my Ph.D.
After my Ph.D., I continued as a postdoctoral research fellow in the Neuroengineering and Robotics Lab (NearLab), Politecnico di Milano. Today, I am with TomTom N.V. where I was driving control for autonomous vehicles and now leading the developments for probabilistic approaches to map making.
I have a strong background in many aspects of control and probabilistic approaches to state estimation. The former includes (non) linear and optimal control, e.g., for motion planning and control. In the latter, I worked intensively with Bayesian Filters, factor graphs, and probabilistic models that I applied to sensor fusion, localization and mapping (SLAM), and information fusion.

Selected Projects
Autonomous Driving
Control of a Car-Like Vehicle
A simulation of a (simplified) closed-loop path-tracking controller as presented in [IFAC 2020]. In this demonstration, a steering disturbance can be applied to illustrate the impact of road inclination, side-wind, side-slip, and other effects. In the absence of a disturbing influence, the controller-internal velocity decoupling allows exact path tracking independent of the driving velocity.In vehicle tests (Volvo XC-90), the controller achieves a lateral tracking accuracy of around 8 cm.
Grasping-Neuroprosthesis

FES Hand Neuroprosthesis
This project considers paralyzed hand functions as a typical cause of stroke. Electrical pulses applied to the motor nerves induce artificial muscle contractions (Functional Electrical Stimulation, FES). Three muscles are involved to control arbitrary angles of wrist extension and to realize grasping. A feedback of the electrical muscle responses (Electromyography, EMG) is used to estimate the muscle-internal states and to ensure the desired reaction of the muscles to FES. Only one EMG-channel is required to observe all three muscles.
In an earlier stage, open-loop control was investigated, which was then superseded by automatic, feedback-controlled approaches (see video). Herein, with feedback being active, the operator manually issued movement commands, e.g., to extend the wrist or grasp.
The control system was tested in ten healthy subjects (not all shown in the video). They were asked to not volitionally participate in the hand movements. Placing the stimulation electrodes involves a trial-and-error procedure before activating the system to find good positions. However, with an increasing number of tested participants, a better, more general understanding of the placement could be found.
Arm Elevation Support
[REF]

FES Arm Neuroprosthesis
This is a system intended for persons who have only weak residual activity in the shoulder deltoid muscle. By Functional Electrical Stimulation (FES) an artificial muscle contraction is added such that the full extent of arm movements is restored. Behind the scenes, a positive-feedback control system measures the elevation-angle to amplify volitional movements. Electromyography (EMG) is used to compensate for the effects of rapidly progressing muscle fatigue under FES.
In effect, the participant (stroke, paresis in shoulder deltoid muscle) shown in this video could elevate his arm much higher than without the arm neuroprosthesis. The entire movement is still under his control, as the system detects his intention to move.
Restoration of Reaching Functions

FES Arm Neuroprosthesis and Exoskelleton
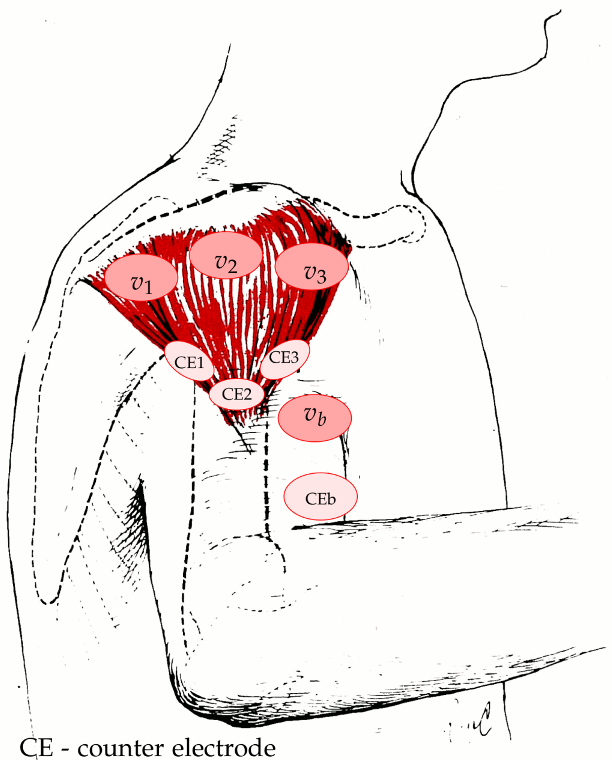
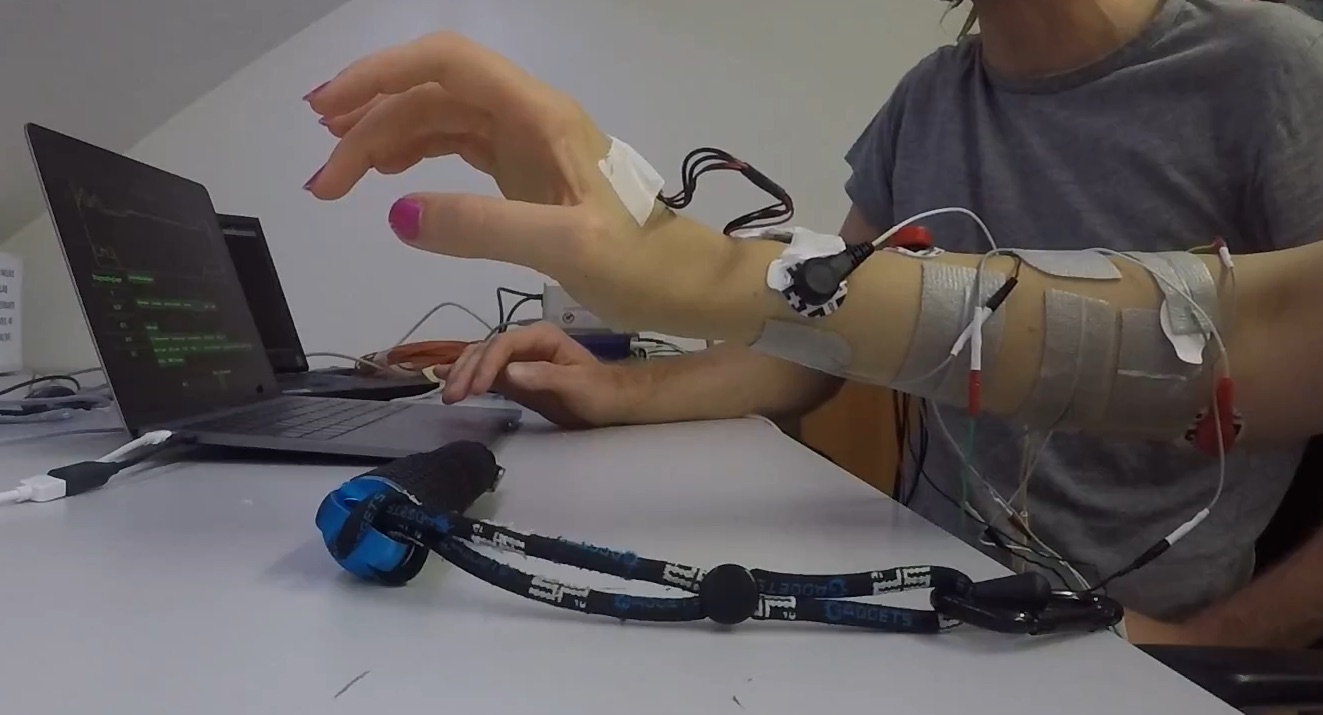
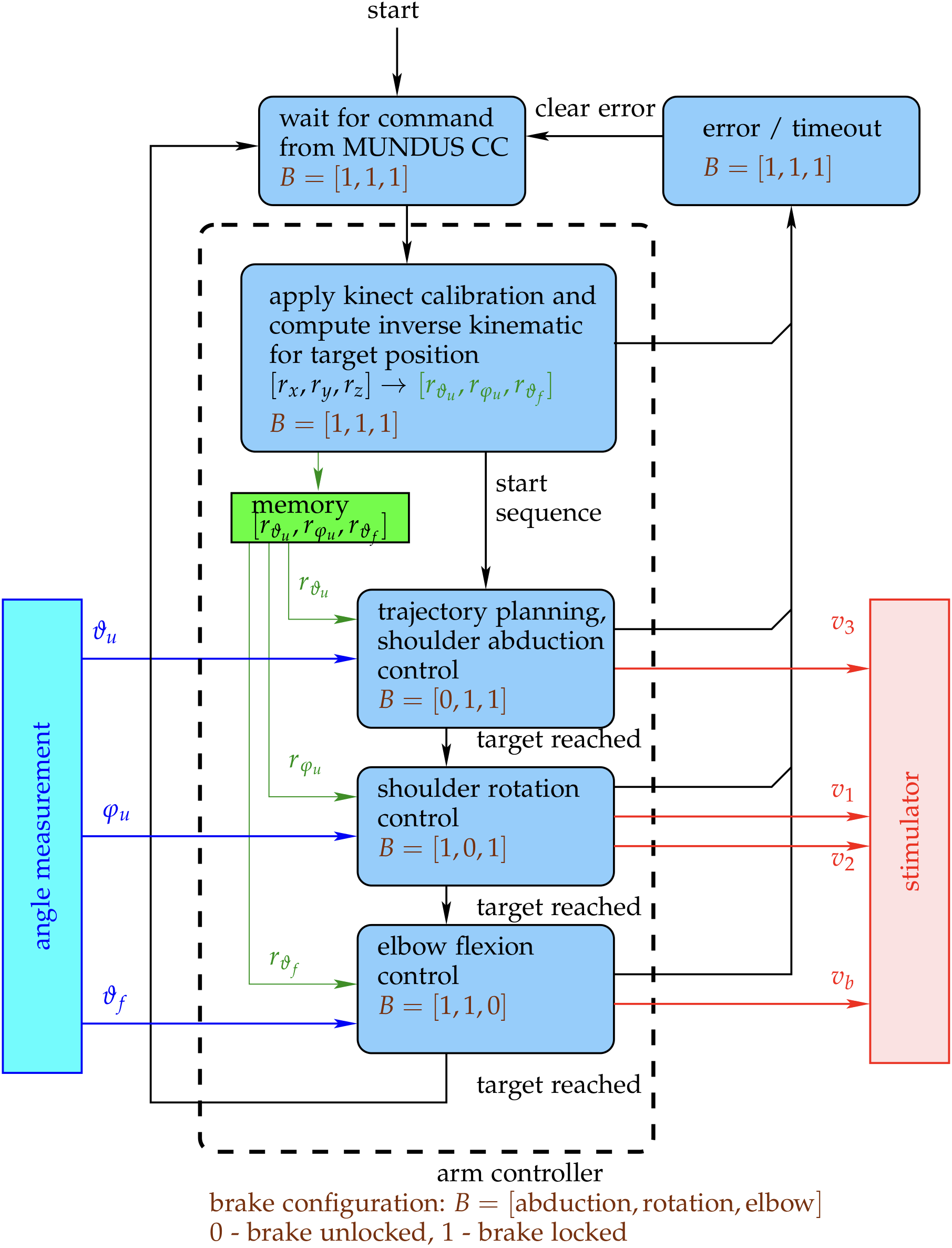
Within the European project MUNDUS, an assistive framework was developed for the support of arm and hand functions during daily life activities in severely impaired people. This contribution aims at designing a feedback control system for Neuro-Muscular Electrical Stimulation (NMES) to enable reaching functions in people with no residual voluntary control of the arm and shoulder due to high level spinal cord injury. NMES is applied to the deltoids and the biceps muscles and integrated with a three degrees of freedom (DoFs) passive exoskeleton, which partially compensates gravitational forces and allows to lock each DOF. The user is able to choose the target hand position and to trigger actions using an eyetracker system. The target position is selected by using the eyetracker and determined by a marker-based tracking system using Microsoft Kinect. A central controller, i.e., a finite state machine, issues a sequence of basic movement commands to the real-time arm controller. The NMES control algorithm sequentially controls each joint angle while locking the other DoFs. Daily activities, such as drinking, brushing hair, pushing an alarm button, etc., can be supported by the system. The robust and easily tunable control approach was evaluated with five healthy subjects during a drinking task. Subjects were asked to remain passive and to allow NMES to induce the movements. In all of them, the controller was able to perform the task, and a mean hand positioning error of less than five centimeters was achieved. The average total time duration for moving the hand from a rest position to a drinking cup, for moving the cup to the mouth and back, and for finally returning the arm to the rest position was 71 s.
Numerical Codes
Vehicle control and motion planning
Herein, demonstrations of several aspects to vehicle control are given. The topics further included are motion planning in a curvilinear coordinate system and a direct approach to optimal control. Finally, a library for sampling of the position, heading, and curvature information from a continuously extensible path is provided. Continuous tracking of the closest point to a vehicle is used to be computationally efficient. Therefore, and due to an C++ and Simulink (suggested) interface, the integration with real-time systems by is possible.State estimation and mapping
This includes- an illustration of simultaneous localization and mapping (SLAM) based on factor graphs, and
- an Extended Kalman Filter (EKF) in C++. The implementation is template-based and uses automatic differentiation to derive the linearization of the given system dynamics.
Research on feedback controlled Neuro-Prosthetic Systems

- Motion feedback control strategies applied to the upper limb extremities using Functional Electrical Stimulation (FES)
- Mehods for improving feedback control of Neuro-prosthetic systems. An underlying feefback of the muscular recruitment (Lambda, λ-control) measured by the FES evoked EMG was introduced.
- Methods for evaluating the volitional EMG
- Investigation of co-contracted antagonistic muscle pairs with the aim to improve motor functions.
- Variable sampling rate systems; The aim is the application to FES for reducing muscle fatigue.
Recruitment Control
A novel control method (Lambda, λ-control) was developed which linearises the static input non-linearity (recruitment curve) of FES-activated muscles by fast feedback of the detected muscle activity caused by FES. This activity is estimated by the FES evoked electromyogram (eEMG). It could be shown that the developed approach robustly compensates the unwanted effects related to uncertainties and time-variances of the highly nonlinear muscular recruitment behavior. The Lambda-control method allows the precise adjustment of the muscular recruitment. Therefore, the feedback-controlled muscles are much easier to model and to control in Neuro-prosthetic systems.Brain Computer Interface (BCI)
[REF]
FES Arm Neuroprosthesis controlled by a Brain-computer Interface
A two-class brain-computer interface (Berlin-BCI) allows the user to select a target position. This position is then continuously realized by a feedback-controlled FES-system attached to the shoulder deltoid to produce horizontal arm movements.
Research on Discrete-Time Control Systems
- Discretisation and control of linear, time-invariant systmes under irregular output-sampling and actuation frequencies (variable sample rate systems).
- Exact linearisation of nonlinear discrete-time systems.
Inertial Measurement Units (IMU)
- Kalman Filter for orientation-estimation
- Combination of multiple IMUs to determine inter-segment joint angles in the human body
- Determination of joint-angle acceleration using kinematic models
Open-Source Software Projects
OpenRTdynamics 2 (Python-based), OpenRTdynamics.github.io (OpenRTdynamics 1, Scilab-based)): A framework for the implementation of advanced real-time control systems aiming to be an open-source alternative to Simulink Coder. It provides features including state machines and, as a real-time capable interpreter is used, sub-simulations that can be exchanged during runtime. Besides, this framework properly handles multiple threads, their communication, allows to synchronize control systems to external events (e.g. even irregular timers or incoming network packages) and provides many other nice features. Because of a high-level schematic-description language -- based on Scilab commands provided by a toolbox -- lower implementation-effort results compared to C/C++.
This framework has grown since 2008 along with the needs for the implementation of the feedback-control schemes in the area of neuroprosthetics.